
Rapid Remote Control Underwater Ultrasonic Wave Communication Sensor




Introduction of Underwater Ultrasonic Wave Communication Sensor
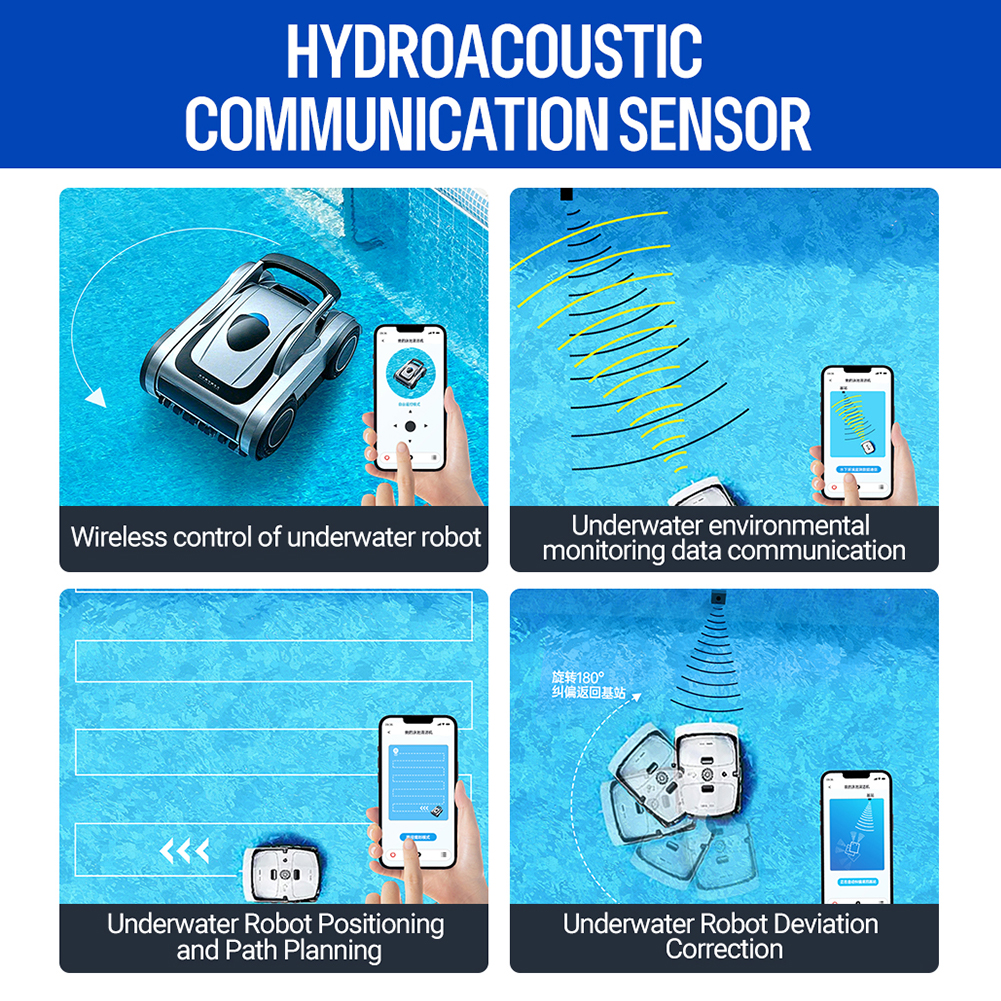
The sensors are designed specifically for complex underwater environments, achieve shouting-distance data communication underwater. There are 2 different specifications: dual-module and triple-module, and feature functions such as rapid remote control, multi-byte communication, positioning, and deviation correction :
1. Dual-module (DYP-C01A)–Function: Rapid Remote Control, Multi-byte Communication
(1) The module enables rapid remote control in underwater environments, and the optional byte bits for remote control are 1-8 bits, the product has the fastest response time of 300ms.
(2) The module is realized to the function of bidirectional data interaction in the underwater environment, supported to data transmission between two modules. The length of data transmitted each time can be selected from 1 to 7 bytes.
2. Triple-Module (DYP-C01B)–Function: Rapid Remote Control, Multi-byte Communication, Positioning, and Deviation Correction
(1) The module positioning function can obtain the distance value between the base station module and the slave module, which can be used for navigation, return, path planning, etc. of underwater robots.
(2) Sensors can provide the offset Angle between the machine and the base station, thereby achieving the optimal path planning for the machine’s return.
Specification of Underwater Ultrasonic Wave Communication Sensor
|
Product Item |
DYP-C01A(Dual-Module) |
DYP-C01B(Triple-Module) |
|
Function |
Remote Control, Multi-byte |
Remote Control, Multi-byte, Positioning, Deviation Correction |
|
Working Voltage |
5V±5% |
5V±5% |
|
Standby Current |
<18mA |
<18mA |
|
Average Operating Current |
<30mA |
<30mA |
|
Max Communication Distance |
1~2000cm |
1~2000cm |
|
Communication Perspective |
360deg |
360deg |
|
Communication Time-delay |
Minimum 300ms |
Minimum 510ms |
|
Communication Byte |
1~7 Byte |
1~7 Byte |
|
Positional Accuracy |
- |
3+S*1%cm |
|
Output Method |
UART controlled、 RS485 |
UART controlled、 RS485 |
|
IP Rate |
Water Pressure Test5M@168H |
Water Pressure Test5M@168H |